Ball Tests:
Ball 1: Bouncy ball with a liquid interior
Ball 2: hard ball filled with air
Ball 3: A hard bouncy ball moving across a plane
The above 3 Balls Bouncing a cross a Plane:
These are all of the balls from above placed onto one plane so one can compare difference in timing, spacing and materials the balls are made out of.
http://rebeccameilak.blogspot.co.uk/2013/01/timing-and-squash-and-stretch-test-week.html
Ball and Tail
This is the finished animation as it stands on the Ball and Tail character animation. I found this project very fun as it allowed me to add some humour to my animation especially with anticipation and prolonging action to increase the sense of anticipation. I would have liked to have been able to animate the tail as an animate object instead of being limp as it would have been a good tool of expression instead of using the squash and stretch which I found quite limiting.
Ball and Legs Walk Cycles:
Ball and Legs Tutorial Walk:
I found this tutorial really useful in understanding the key poses for the legs in a walk cycle and also drew my attention to the importance to the position of the feet. Using the graph editor was particularly useful in making the feet stick and achieving a smooth banking side to side motion. What I would like to do next with this rig is to play around with the walk to give it different rhythms and personality as well as experiment with the squash and stretch deformer.
http://rebeccameilak.blogspot.co.uk/2013/02/walk-cycles-week-4.html
Skipping:
This walk cycle was the most difficult one out of the three because the knees kept wobbling. In-between the key frames the knees kept moving about and it was really difficult to find a way to stop them, through changing the key frame values or through the graph editor. This cycle was particularly interesting to do because at the passing position the feet are both of the ground. I also decided to extend the number of frames for the cycle to 27 frames so the ball could have more lengthy bounds.
TipToe Walk:
What defines this walk in the up and down motion as it creeps forward. Only once had I created enough contrast between the two extremes only then did the walk look effective. Unlike any of my previous walk the legs were never fully extended which made the walk fun to do as it allowed sense of compression and realise which gave a feeling of a bounce. With this cycle I decided to experiment with the squash and stench deformed on the ball as I noticed when analysing this walk that as I moved up and down I was squashing and extending my body. Again with this cycle I extended the number of frames to 38 to make the walk look slow, measured and purposeful.
Walking with a Limp:
This was very much inspired by the walk cycle form the Walk Cycle Depot (above). Here I exaggerated the rotation on the right hip in order to lift the right leg off the ground. Here I also experimented with different timings. The right leg takes 25fr to take one step where are the left leg takes 11fr. I decided to do this to exaggerate the limp and give the feeling that the right leg can't take any weight so the left leg has to move quickly to take the weight again.
http://rebeccameilak.blogspot.co.uk/2013/02/walks-with-personality-week-5.html
Digital Tutors Walk Cycles:
DT Male Walk Cycle:
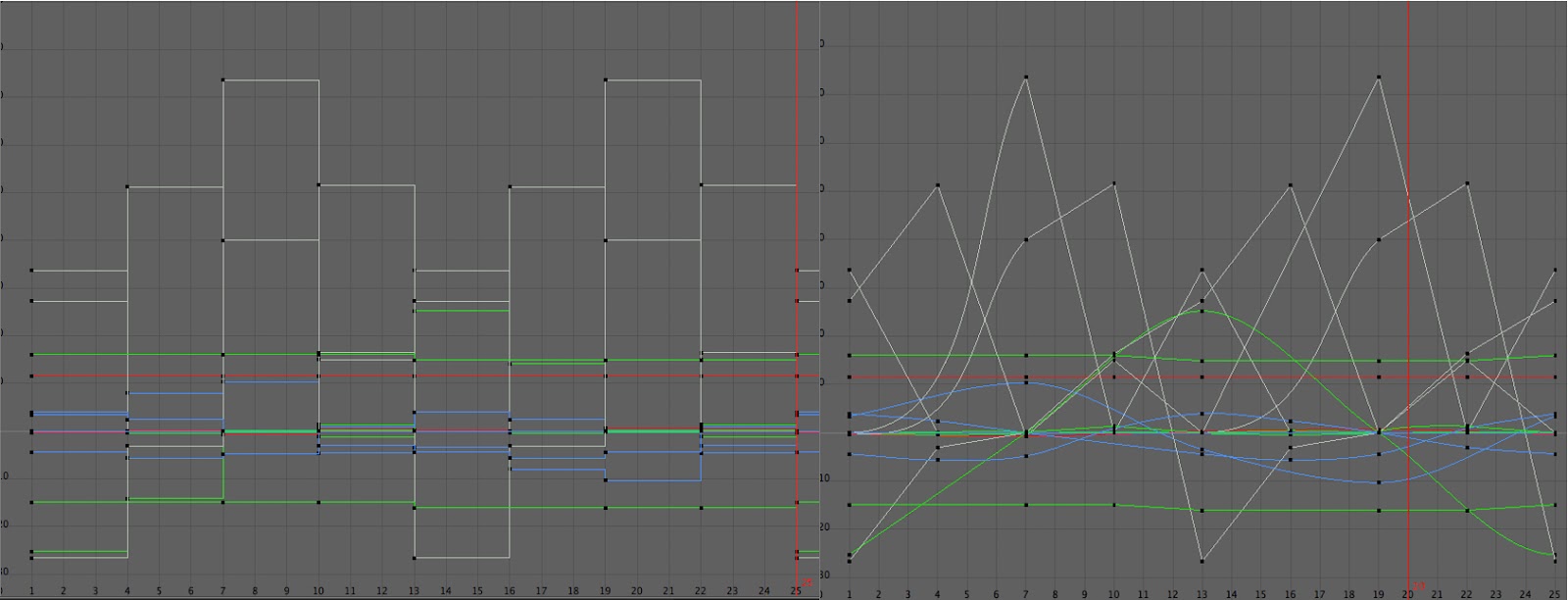
The movement of the upper torso and arms was interesting to do. To create an overlap with the bobbing of the head, chest, back and lower torso all were selected and keyed in to certain positions. Then using the graph editor the key frames where moved along the time line so the keys were out of sync by a frame (see bellow). This showed another fantastic tool the graph editor is and how it can be used to create overlap with a number of components.
Moving the rig from A to B:
As well as the walk cycle the tutorial showed how to make the rig walk forward whilst keeping the timing of the contact positions correct. To create this illusion properly the feet have to stick while the other is moving otherwise it looks as if they are sliding forward instead of pushing it's self forward.
DT Female Walk Cycle:
The four main areas of difference between a male and female walk occur in the arm, knee and feet movement and the hip sway.
- The arms are more turned out so that they don't hit their hips which are generally wider than men's. This main adjustment was done on the passing frames, when the arms go past the hips, on the rotate X axis.
- The Hip Sway was exaggerated by making the hips move further in the X axis in the down and contact positions. This made the hips 'pop' into place but had a stronger movement that the male walk.
- The feet where brought inwards to a more central point and again this was mostly done on the passing position. This made the position of the feet not as wide apart as the male walk. In the male walk at the passing position the foot had moved way from the centre in an almost circling motion. By moving in the feet I felt it helped in exaggerating the movement of the hips.
- The knees like the feet were also made to be more central and closer together and in the down positing are keyed to move inwards even further. This I feel also helps to make the hips pop.
http://rebeccameilak.blogspot.co.uk/2013/02/digital-tutors-walk-cycle-week-4.html
Proposal:
The character interaction I plan to have between the DT rig and the ball and tail rig is that of dog and owner. The nature of the human's walk will start off relaxed, clam head faceing towards the sky, possiably looking around as if the character lost in thought and in't paying to much attention to the dog.
The dog however is very excited jumping around in different diratetions but generally traveling forward. The change of passing happens when the ball starts to move faster in a striagter direction and the poor owner is dragged along. The ball suddenly stops almost causing the owner to fall. The last shot is of the ball shooting of in a side diration catching the owner off balance draging him towards a low angled camera.
Storyboards:
Set Layout Plan:
A street with trees to the right of the characters and houses to the left the character are traveling right to left along this layout plan.
Reference Videos:
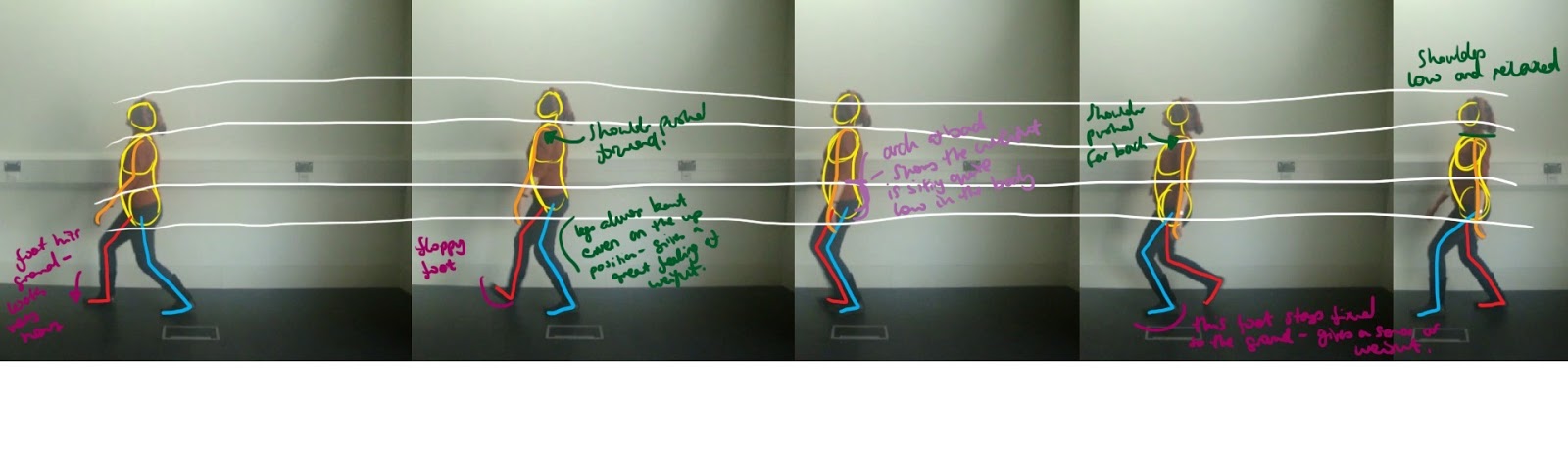
Here I have two reference videos one looking at mainly the walk of the owner, both casual and then being pulled by the dog. These videos will provide a reference between the two different walk cycles and their postures.
The second focused on the dog and it's movement. Although I won't be using a four legged rig it still is good reference to understand the dogs body language, especially squash and stretch and the posture/action of the tail.
Human Walk Cycles Reference Video:
Dog Movement and Body language Reference:
Background design:
As I have no experimenc in createing an atmospheric enviorment in Maya yet I want to create the enrioment using image planes or possibaly compositing the animation with an alpha layer into aftereffects with photoshop backgrounds. The background bellow is what I would like the street to look like. In a film bellow that is a quick After Effects test where I have placed my DT walk cycle in front of my background. If I were to take this idea forward I would need to find a way of creating a shadow in Maya using various lights to give the characters a sense of presence in the scene other wise they will look like they are flouting.
Scenery Design:
After Effects Compositing Test:

 In the digital tutors vides to make the rig walk the ground plane was keyed at the beginning and at the end of a cycle and had no keys in between. This produced as straight line on the graph editor and although the feet didn't slide I felt that the walk was to smooth and that the feet needed to be more planted.
In the digital tutors vides to make the rig walk the ground plane was keyed at the beginning and at the end of a cycle and had no keys in between. This produced as straight line on the graph editor and although the feet didn't slide I felt that the walk was to smooth and that the feet needed to be more planted.